Projets Scolaires
Projet d'infographie 3D (2024)
Description : Dans le cadre de l'unité d'enseignement LO13 j'ai réalisé un projet en lien avec l'infographie 3D.
Le projet avait les buts suivants :
- Afficher un maillage triangulaire fourni
- Appliquer des transformations à ce maillage (translation, rotation, zoom...)
- Créer plusieurs modes d'affichage dont une méthode d'ombrage constant et de Phong
- Afficher des plans, des projections orthographiques, l'ombre projetée du maillage...
Ce projet était très complet, il a lié théorie des transformations géométriques et des méthodes d'ombrage à sa mise en pratique.
Il m'a permis de mieux appréhender le codage et d'avoir une première expérience avec la librairie OpenGl.
Robot Suiveur de Ligne - Bac +1
Description : Ce projet classique consistait à construire un robot capable de suivre une ligne tracée au sol.
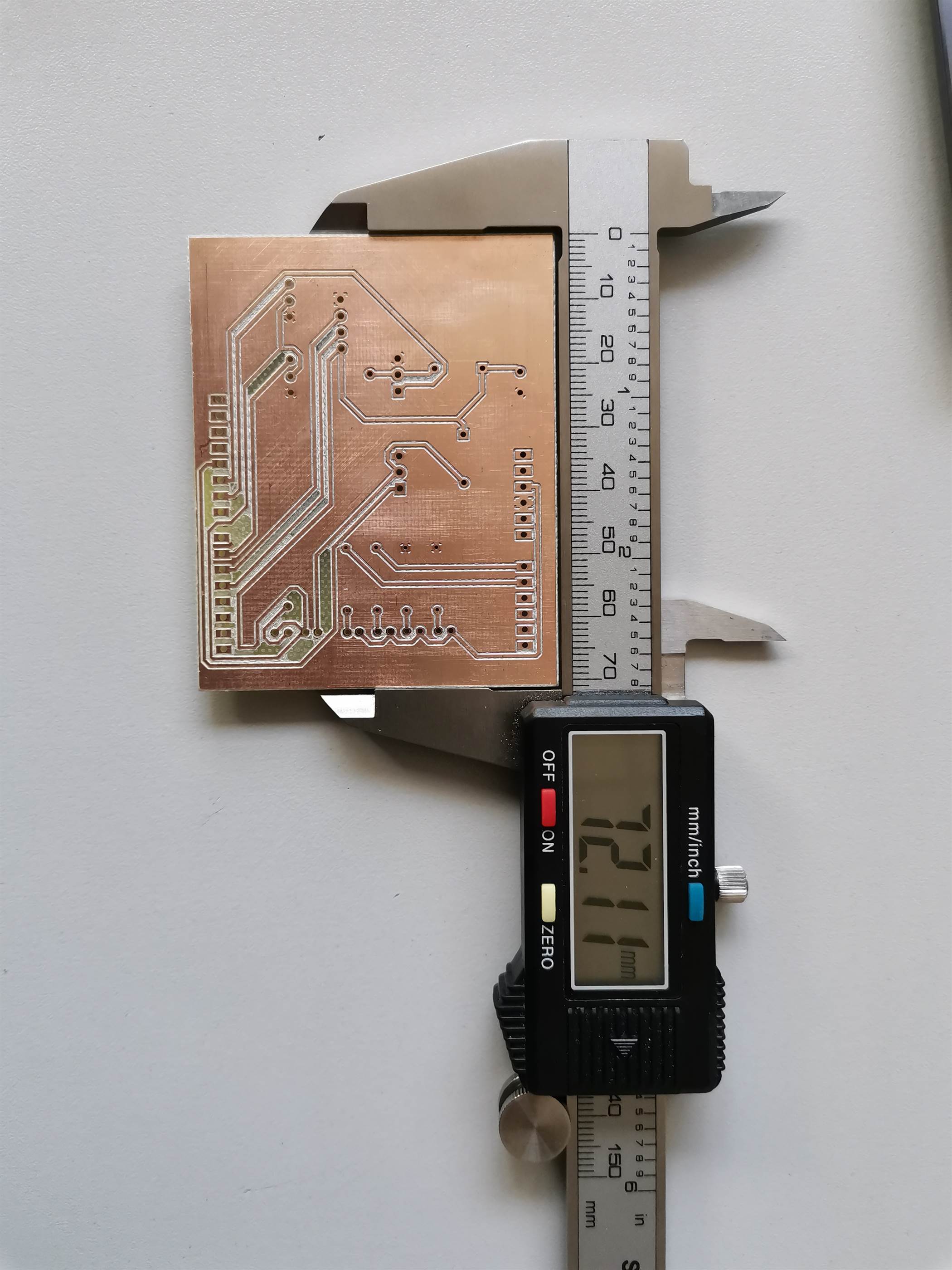
J'ai conçu mon premier PCB (circuit imprimé) pour optimiser l'électronique du robot et programmé une Arduino pour contrôler ses mouvements.
L'objectif principal était de rendre le robot le plus rapide possible tout en suivant précisément la ligne.
Ce projet m'a permis d'acquérir une expérience pratique en fabrication de circuits imprimés et en programmation d'Arduino.
CAO avec Creo et Catia - Bac +3
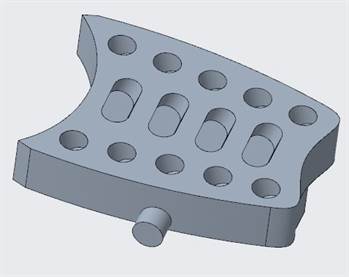
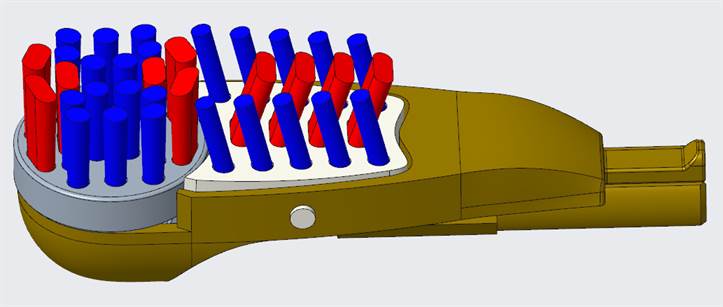
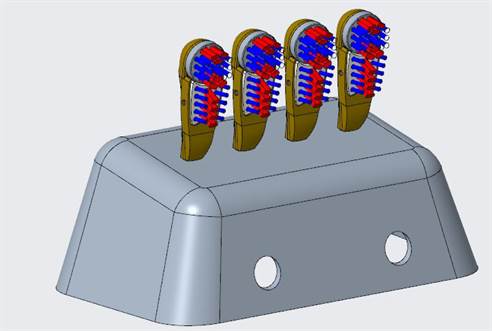
Description : Ce projet portait sur la conception assistée par ordinateur (CAO) à l'aide des logiciels Creo et Catia.
Mon travail consistait à dimensionner des engrenages et à simuler une transmission hydraulique.
Grâce à ces logiciels, j'ai pu optimiser les systèmes mécaniques pour assurer leur bon fonctionnement sous des conditions de charge spécifiques.
Mur Trombe - TPE en Première
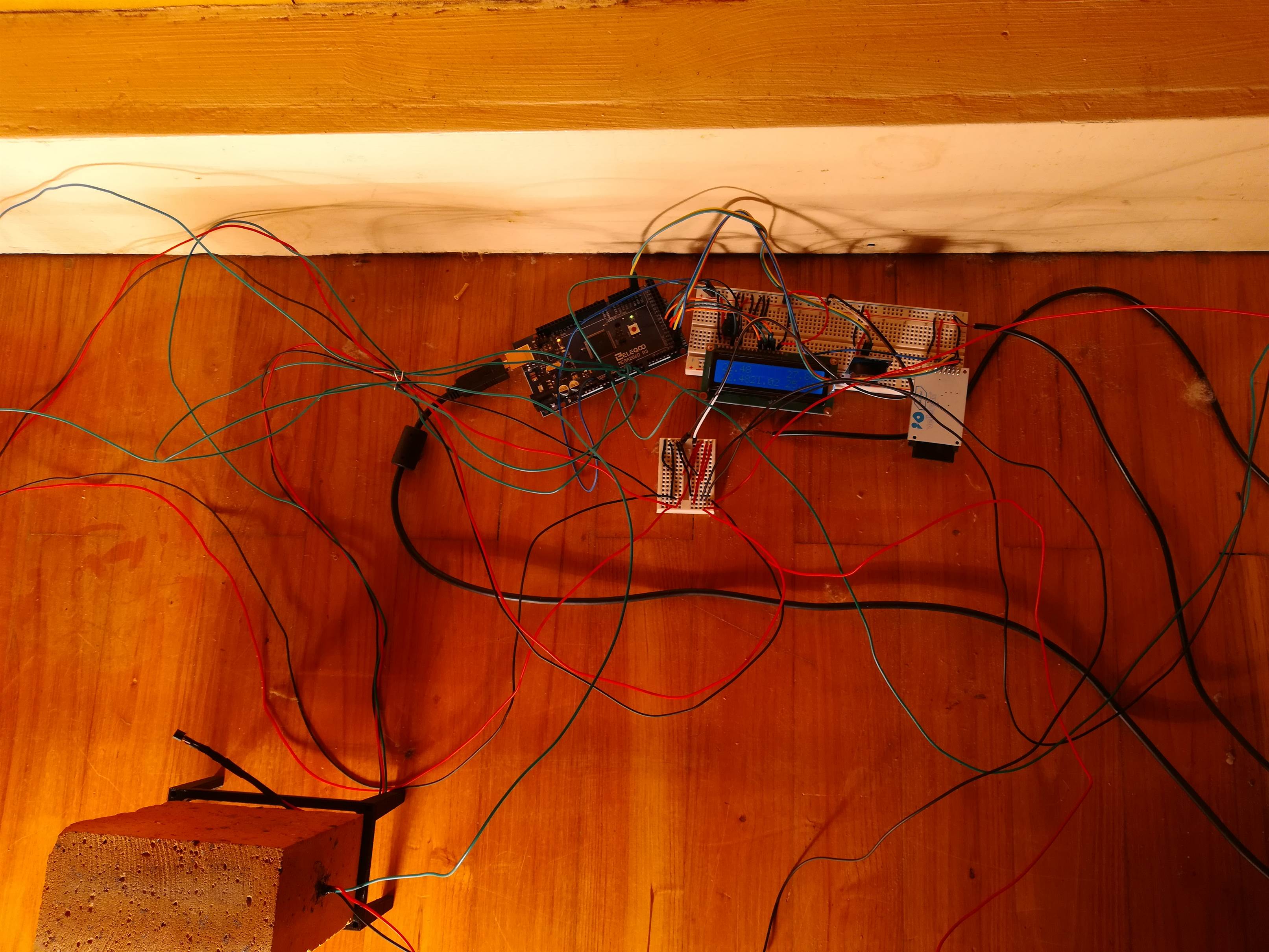
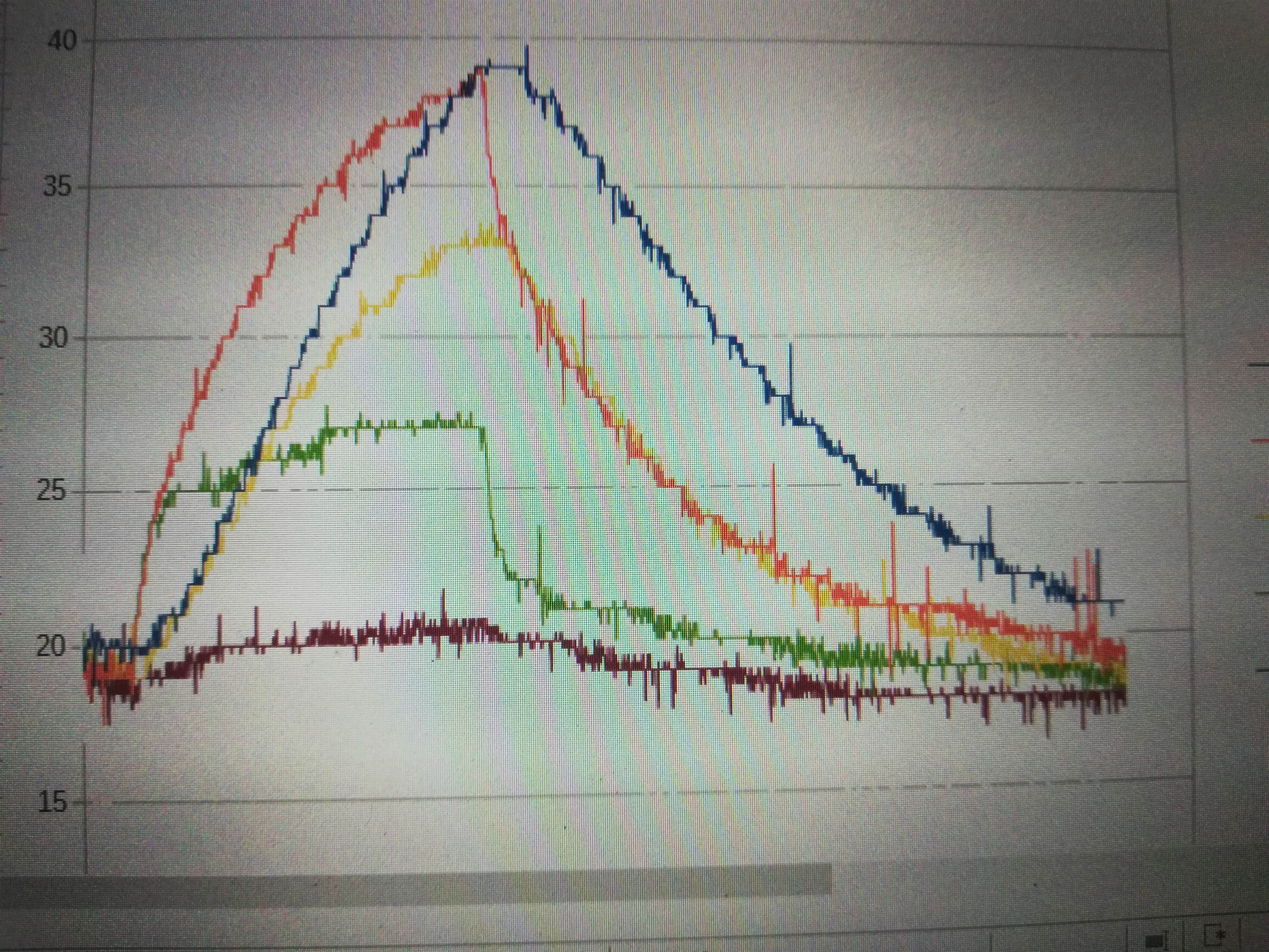
Description : Lors de ce projet de Travaux Personnels Encadrés (TPE), notre objectif était de quantifier l'efficacité d'un mur Trombe en tant que système de chauffage passif.
Nous avons conçu une boîte en plexiglass découpée au laser, simulant le fonctionnement d'un mur Trombe.
Nous avons également développé un système d'acquisition de température avec une Arduino pour mesurer la montée en température à l'intérieur de la boîte, et avons analysé les données pour évaluer la performance énergétique de cette solution.

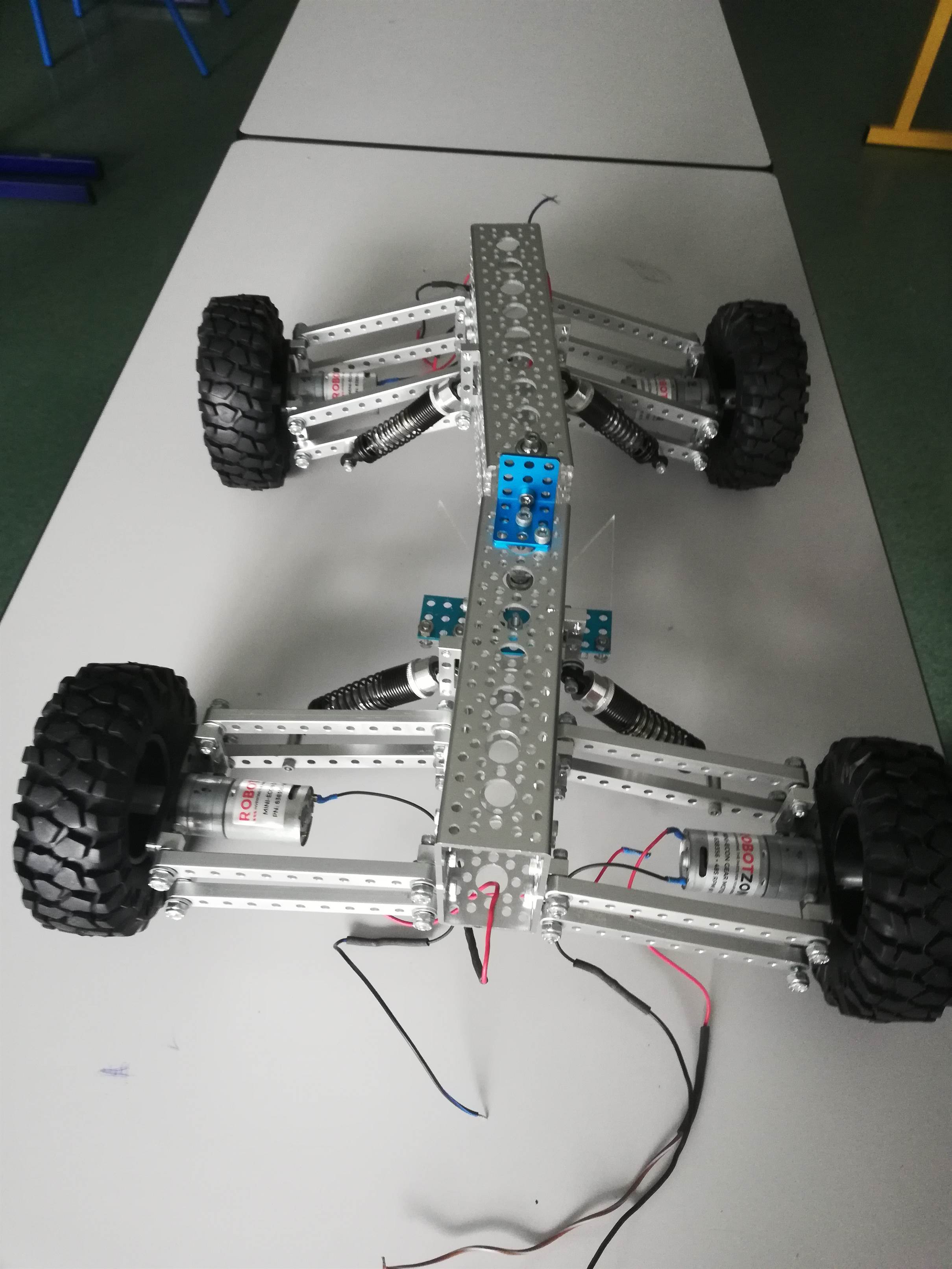
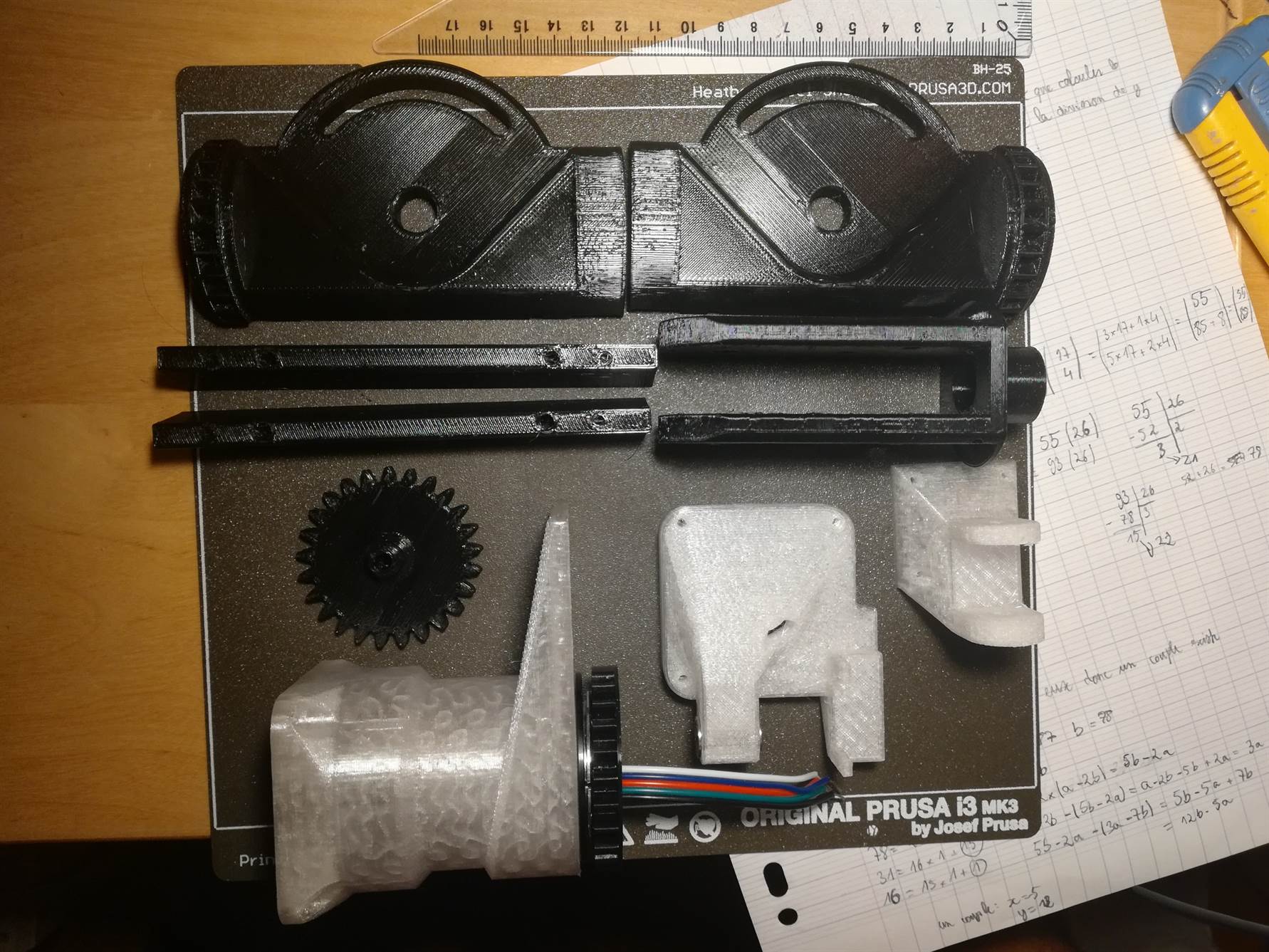
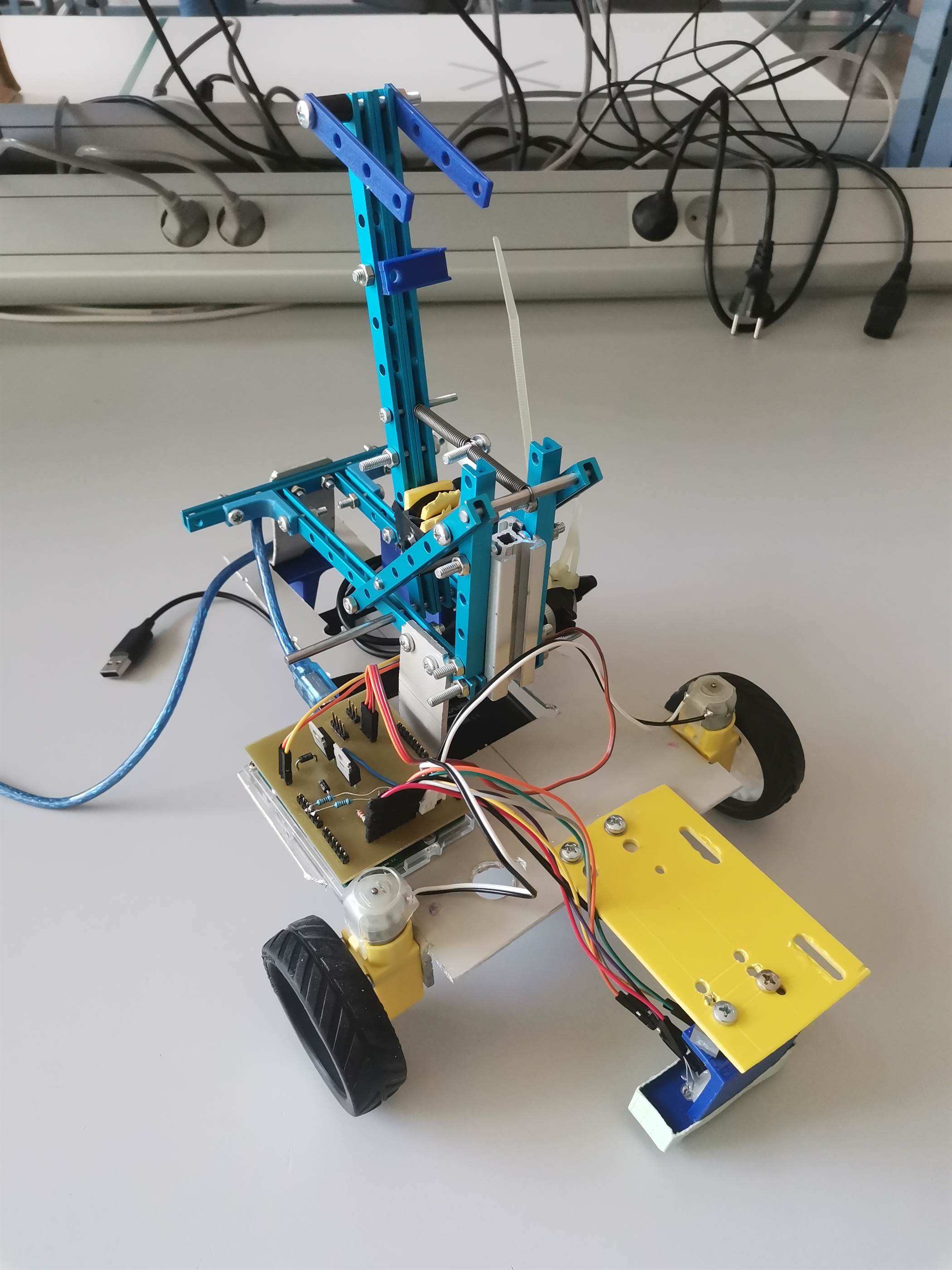
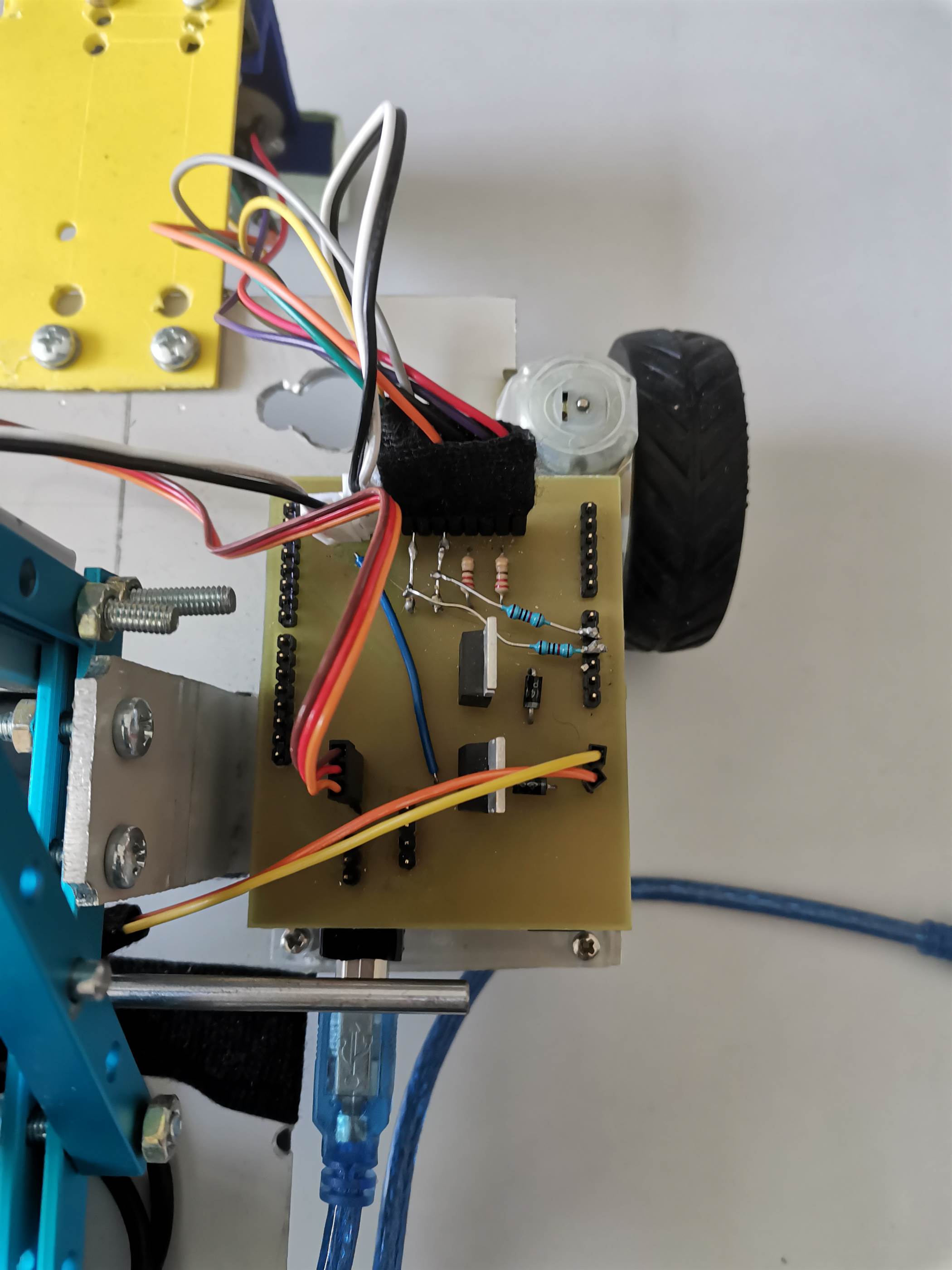
Robot pour Conditions Extrêmes - Terminale
Description : Ce projet consistait à concevoir un robot capable de se déplacer dans des conditions extrêmes.
J'ai conçu un mât motorisé stabilisé par un gyroscope, et j'ai assemblé une télécommande de contrôle.
Le robot devait pouvoir maintenir sa stabilité et changer de direction rapidement grâce à un système de direction inspiré d'un vélo.
Ce projet m'a permis de développer mes compétences en mécanique, électronique et contrôle de systèmes embarqués.